Tugas Besar - Smart System Pada Kandang Ayam
1. TUJUAN [KEMBALI]
penulisan blog ini bertujuan untuk :
· Dapat membuat dan mensimulasikan aplikasi dari gerbang logika, encoder, flip-flop.
· Dapat memahami teori dan prinsip kerja dari gerbang logika, encoder, flip-flop.
2. ALAT DAN BAHAN [KEMBALI]
ALAT :
1. Power Supply

2. Voltmeter

3. Probe Voltage

BAHAN :
1. Resistor













Komponen Input :






Komponen Output :




Komponen Lainnya :

3. DASAR TEORI [KEMBALI]
- Resistor
Resistor adalah komponen elektronika pasif yang memiliki nilai resistansi atau hambatan tertentu yang berfungsi untuk membatasi dan mengatur arus listrik dalam suatu rangkaian elektronika. Satuan Resistor adalah Ohm (simbol: Ω) yang merupakan satuan SI untuk resistansi listrik. Resitor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan hukum Ohm (V = I.R ).




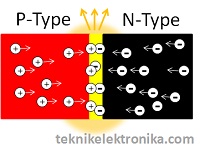
- Dioda
Dioda adalah komponen yang terbuat dari bahan semikonduktor dan mempunyai fungsi untuk menghantarkan arus listrik ke satu arah tetapi menghambat arus listrik dari arah sebaliknya. Sebuah Dioda dibuat dengan menggabungkan dua bahan semi-konduktor tipe-P dan semi-konduktor tipe-N. Ketika dua bahan ini digabungkan, terbentuk lapisan kecil lain di antaranya yang disebut depletion layer. Ini karena lapisan tipe-P memiliki hole berlebih dan lapisan tipe-N memiliki elektron berlebih dan keduanya mencoba berdifusi satu sama lain membentuk penghambat resistansi tinggi antara kedua bahan seperti pada gambar di bawah ini. Lapisan penyumbatan ini disebut depletion layer.

Jika tegangan negatif diterapkan ke anoda dan tegangan positif diterapkan ke katoda, dioda dikatakan dalam kondisi bias terbalik. Selama keadaan ini tegangan negatif akan memompa lebih banyak elektron ke material tipe-P dan material tipe-N akan mendapatkan lebih banyak hole dari tegangan positif yang membuat depletion layer lebih besar dan dengan demikian tidak memungkinkan arus mengalir melaluinya. Kondisi ini hanya terjadi pada dioda yang ideal, kenyataannya arus yang kecil tetap dapat mengalir pada bias terbalik dioda.


Dioda dapat dibagi menjadi beberapa jenis:
1. Dioda Penyearah (Dioda Biasa atau Dioda Bridge) yang berfungsi sebagai penyearah arus AC ke arus DC.
2. Dioda Zener yang berfungsi sebagai pengaman rangkaian dan juga sebagai penstabil tegangan.
3. Dioda LED yang berfungsi sebagai lampu Indikator ataupun lampu penerangan.
4. Dioda Photo yang berfungsi sebagai sensor cahaya.
5. Dioda Schottky yang berfungsi sebagai Pengendali.

*Dioda Schottky biasanya berukuran lebih besar dibandingkan dengan dioda penyearah dan memiliki ciri fisik yang sama
Untuk menentukan arus zenner berlaku persamaan:



- Transistor
Transistor adalah sebuah komponen di dalam elektronika yang diciptakan dari bahan-bahan semikonduktor dan memiliki tiga buah kaki. Masing-masing kaki disebut sebagai basis, kolektor, dan emitor.
1. Emitor (E) memiliki fungsi untuk menghasilkan elektron atau muatan negatif.
2. Kolektor (C) berperan sebagai saluran bagi muatan negatif untuk keluar dari dalam transistor.
Berfungsi sebagai penguat, sebagai sirkuit pemutus dan penyambung arus (switching), stabilisasi tegangan, dan modulasi sinyal.

Selain itu, transistor biasanya juga dapat digunakan sebagai saklar dalam rangkaian elektronika. Jika ada arus yang cukup besar di kaki basis, transistor akan mencapai titik jenuh. Pada titik jenuh ini transistor mengalirkan arus secara maksimum dari kolektor ke emitor sehingga transistor seolah-olah short pada hubungan kolektor-emitor. Jika arus base sangat kecil maka kolektor dan emitor bagaikan saklar yang terbuka. Pada kondisi ini transistor dalam keadaan cut off sehingga tidak ada arus dari kolektor ke emitor.
Rumus transistor NPN:

Karakteristik I/O

Bentuk gelombang I/O

IC OP AMP
Penguat operasional atau yang dikenal sebagai Op-Amp merupakan suatu rangkaian terintegrasi atau IC yang memiliki fungsi sebagai penguat sinyal, dengan beberapa konfigurasi. Secara ideal Op-Amp memiliki impedansi masukan dan penguatan yang tak berhingga serta impedansi keluaran sama dengan nol. Dalam prakteknya, Op-Amp memiliki impedansi masukan dan penguatan yang besar serta impedansi keluaran yang kecil.

Inverting Amplifier




Komparator


Adder


Rangkaian Dasar OpAmp


Op-Amp memiliki beberapa karakteristik, diantaranya:
a. Penguat tegangan tak berhingga (AV = ∼)
b. Impedansi input tak berhingga (rin = ∼)
c. Impedansi output nol (ro = 0) d. Bandwidth tak berhingga (BW = ∼)
d. Tegangan offset nol pada tegangan input (Eo = 0 untuk Ein = 0)
 |
Grafik input dan output op amp |
- Potensiometer

Pada dasarnya bagian-bagian penting dalam Komponen Potensiometer adalah :
1. Penyapu atau disebut juga dengan Wiper
2. Element Resistif
3. Terminal
Jenis-jenis Potensiometer
1. Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
2. Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
3. Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.
Fungsi-fungsi Potensiometer
1. Sebagai pengatur Volume pada berbagai peralatan Audio/Video seperti Amplifier, Tape Mobil, DVD Player.
2. Sebagai Pengatur Tegangan pada Rangkaian Power Supply
3. Sebagai Pembagi Tegangan
4. Aplikasi Switch TRIAC
5. Digunakan sebagai Joystick pada Tranduser
6. Sebagai Pengendali Level Sinyal
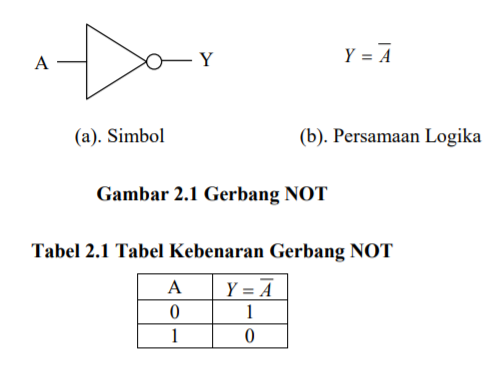
- Gerbang NOT
Gerbang NOT disebut juga inverter, gerbang ini hanya mempunyai satu input dan satu output. Persamaan logika aljabar Boole untuk output gerbang NOT adalah Y = Ā . Jadi output gerbang NOT selalu merupakan kebalikan dari input-nya. Jika input diberikan logika tinggi maka pada output akan dihasilkan logika rendah, dan pada saat input diberikan logika rendah maka pada output akan dihasilkan logika tinggi (Tokheim, 1995). Simbol gerbang NOT diperlihatkan pada Gambar 2.1 dan tabel kebenaran gerbang NOT diperlihatkan pada Tabel 2.1.
- Gerbang NOR
Arti NOR adalah NOT OR atau BUKAN OR, Gerbang NOR merupakan kombinasi dari Gerbang OR dan Gerbang NOT yang menghasilkan kebalikan dari Keluaran (Output) Gerbang OR. Gerbang NOR akan menghasilkan Keluaran Logika 0 jika salah satu dari Masukan (Input) bernilai Logika 1 dan jika ingin mendapatkan Keluaran Logika 1, maka semua Masukan (Input) harus bernilai Logika 0.

- Gerbang XNOR
Seperti Gerbang X-OR, Gerbang X-NOR juga terdiri dari 2 Masukan (Input) dan 1 Keluaran (Output). X-NOR adalah singkatan dari Exclusive NOR dan merupakan kombinasi dari Gerbang X-OR dan Gerbang NOT. Gerbang X-NOR akan menghasilkan Keluaran (Output) Logika 1 jika semua Masukan atau Inputnya bernilai Logika yang sama dan akan menghasilkan Keluaran (Output) Logika 0 jika semua Masukan atau Inputnya bernilai Logika yang berbeda. Hal ini merupakan kebalikan dari Gerbang X-OR (Exclusive OR).

- Gerbang AND
Gerbang AND adalah gerbang logika yang terdiri dari dua atau lebih input dan hanya memiliki satu output. Output gerbang AND akan tinggi hanya jika semua input tinggi, dan jika salah satu atau lebih input berlogika rendah maka output akan rendah. Persamaan logika aljabar Boole gerbang AND adalah Y=A.B. Pada Aljabar Boole operasi gerbang AND diberi tanda ”kali” atau tanda ”titik” (Malvino, 1983). Simbol gerbang AND ditunjukkan pada Gambar 2.3. Tabel kebenaran diperlihatkan pada Tabel 2.3.

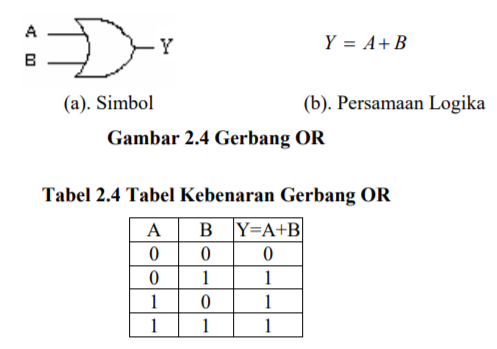
- Gerbang OR
Gerbang OR adalah gerbang logika dasar yang mempunyai dua atau lebih input dan hanya memiliki satu output. Output gerbang OR akan berlogika tinggi apabila salah satu atau lebih input ada yang berlogika tinggi, dan output akan berlogika rendah hanya pada saat seluruh input berlogika rendah. Persamaan logika aljabar Boole untuk output gerbang OR adalah Y=A+B. Pada aljabar Boole operasi gerbang OR diberi tanda ”tambah” (Malvino, 1983). Simbol gerbang OR ini ditunjukkan pada Gambar 2.4 dan tabel kebenaran gerbang OR diperlihatkan Tabel 2.4.
- Gerbang NAND
Gerbang NAND merupakan gabungan dari gerbang AND dan NOT. Output gerbang NAND selalu merupakan kebalikan dari output gerbang AND untuk input yang sama. Jadi output akan berlogika tinggi jika salah satu atau lebih input-nya berlogika rendah, dan output akan berlogika rendah hanya pada saat semua input-nya berlogika tinggi. (Tokheim, 1995). Simbol gerbang NAND ini ditunjukkan pada Gambar 2.5. Tabel kebenaran gerbang NAND diperlihatkan pada Tabel 2.5.

- D Flip-flop
D Flip-flop merupakan salah satu jenis Flip-flop yang dibangun dengan menggunakan Flip-flop RS. Perbedaan dengan Flip-flop RS terletak pada inputan R, pada D Flip-flop inputan R terlebih dahulu diberi gerbang NOT. maka setiap masukan ke D FF ini akan memberi keadaan yang berbeda pada input RS, dengan demikian hanya terdapat 2 keadaan “SET” dan “RESET” S=0 dan R=1 atau S=1 dan R=0, jadi dapat disi. Berikut adalah gambar dari symbol dan data sheet D Flip – flop.

- Encoder
Sebuah rangkaian Encoder menterjemahkan keaktifan salah satu inputnya menjadi urutan bit-bit biner. Encoder terdiri dari beberapa input line, hanya salah satu dari input-input tersebut diaktifkan pada waktu tertentu, yang selanjutnya akan menghasilkan kode output Nbit. Gambar 12-1 menunjukkan blok diagram dari sebuah encoder.

Tabel Kebenaran dari Rangkaian Encoder 8x3 ditunjukkan pada Tabel 12-1.a

Berdasarkan output dari Tabel Kebenaran di atas, dibuat rangkaian encoder yang merupakan aplikasi dari gerbang OR, seperti ditunjukkan pada gambar 12-2.

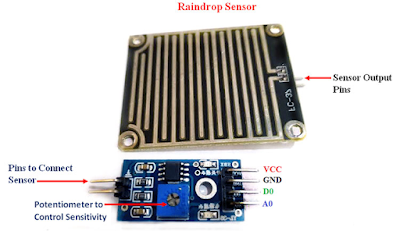
- Rain Sensor
Sensor hujan adalah jenis sensor yang berfungsi untuk mendeteksi terjadinya hujan atau tidak, yang dapat difungsikan dalam segala macam aplikasi dalam kehidupan sehari – hari.
Prinsip kerja dari modul sensor ini yaitu pada saat ada air hujan turun dan mengenai panel sensor maka akan terjadi proses elektrolisasi oleh air hujan. Dan karena air hujan termasuk dalam golongan cairan elektrolit yang dimana cairan tersebut akan menghantarkan arus listrik.
Pada sensor hujan ini terdapat ic komparator yang dimana output dari sensor ini dapat berupa logika high dan low (on atau off). Serta pada modul sensor ini terdapat output yang berupa tegangan pula. Sehingga dapat dikoneksikan ke pin khusus Arduino yaitu Analog Digital Converter. Dengan singkat kata, sensor ini dapat digunakan untuk memantau kondisi ada tidaknya hujan di lingkungan luar yang dimana output dari sensor ini dapat berupa sinyal analog maupun sinyal digital.



- Infrared Sensor
Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat (amplifier). Bentuk dan Konfigurasi Pin IR Detector Photomodules TSOP.
Konfigurasi pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules ) memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip, keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP) akan berlogika 1.Dari grafik dapat disimpilkan bahwa semakin jauh jarak benda maka semakin kecil output nya, dan begitu juga sebaliknya.
![[IR_proximity_sensor.jpg]](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjTvvPGz9n4WdS1L9P2J5NpxCShJom4ynWaMiDY2ncJaYbU3aafkwZy_0GtyrJrMI0kvJ4qEgzBdKls7W5bf606wRwJ7kPG13DR3mkoAHr6OXqxUArcMeJ_huUEcjlY1g1nCTxR2bGRfR7Q/s252/infrared.png)


- LDR
LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenainya. LDR juga dapat digunakan sebagai sensor cahaya. Semakin banyak cahaya yang mengenainya, maka akan semakin menurun nilai resistansinya. Sebaliknya, jika semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai hambatannya akan semakin besar sehingga arus listrik yang mengalir akan terhambat. LDR sering digunakan sebagai sensor lampu penerang jalan otomatis, lampu kamar tidur, alarm, rangkaian anti maling, shutter kamera otomatis, dan lainnya.

Grafik perubahan resistansi terhadap intensitas cahaya.

- LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC pada suhu 25 ºC .

Pada Gambar 5.1 ditunjukan bentuk dari LM35 tampak depan dan tampak bawah. 3 pin LM35 menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan tegangan operasi sensor LM35 yang dapat digunakan antara 4 Volt sampai 30 Volt. Keluaran sensor ini akan naik sebesar 10 mV setiap derajad celcius sehingga diperoleh persamaan sebagai berikut :VLM35 = Suhu* 10 mVSecara prinsip sensor akan melakukan penginderaan pada saat perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan perekat atau dapat pula disemen pada permukaan akan tetapi suhunya akan sedikit berkurang sekitar 0,01 ºC karena terserap pada suhu permukaan tersebut. Dengan cara seperti ini diharapkan selisih antara suhu udara dan suhu permukaan dapat dideteksi oleh sensor LM35 sama dengan suhu disekitarnya, jika suhu udara disekitarnya jauh lebih tinggi atau jauh lebih rendah dari suhu permukaan, maka LM35 berada pada suhu permukaan dan suhu udara disekitarnya.Jarak yang jauh diperlukan penghubung yang tidak terpengaruh oleh interferensi dari luar, dengan demikian digunakan kabel selubung yang ditanahkan sehingga dapat bertindak sebagai suatu antenna penerima dan simpangan didalamnya, juga dapat bertindak sebagai perata arus yang mengkoreksi pada kasus yang sedemikian, dengan mengunakan metode bypass kapasitor dari Vin untuk ditanahkan.

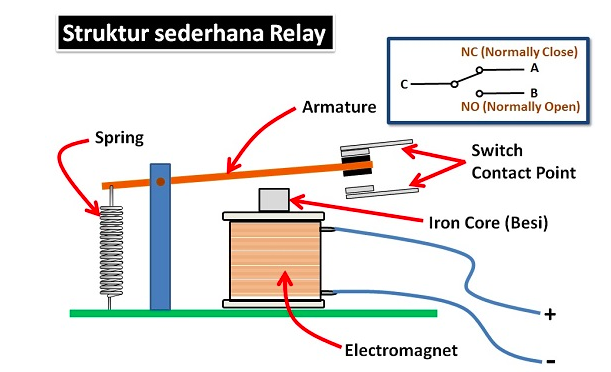
- Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi.
Terdapat besi atau yang disebut dengan nama iron core dililit oleh sebuah kumparan yang berfungsi sebagai pengendali. Sehingga ketika kumparan coil diberikan arus listrik maka akan menghasilkan gaya elektromagnet. Gaya tersebut selanjutnya akan menarik armature untuk pindah posisi dari normally close ke normally open. Dengan demikian saklar menjadi pada posisi baru normally open yang dapat menghantarkan arus listrik. Ketika armature sudah tidak dialiri arus listrik lagi maka ia akan kembali pada posisi awal, yaitu normally close.
Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Maksimum beban AC 10A @ 250/125V
4. Maksimum baban DC 10A @ 30/28V
5. Switching maksimum 300 operasi/menit
- Motor (FAN)
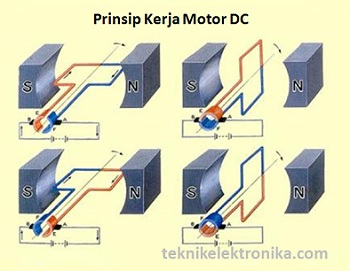
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
Untuk membuatnya berputar hubungkan saja sisi positif (+) baterai ke satu terminal dan tanda Negatif (-) baterai ke ujung lainnya dan motor akan berputar. Jika ingin membalik kecepatan motor cukup tukar terminal dan arahnya juga akan dibalik. Untuk mengontrol kecepatan motor variasikan tegangan yang disuplai ke Motor, cara termudah untuk melakukannya adalah menggunakan Potensiometer.

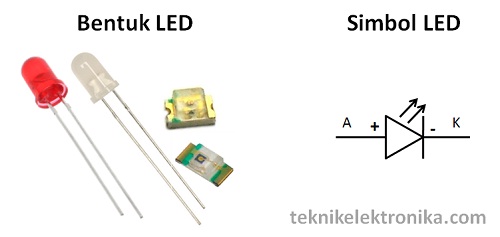
- LED
LED merupakan keluarga dari Dioda yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda.
Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).

- Logicstate
Logicstate yaitu pengertian logis, benar atau salah, dari sinyal biner yang diberikan. Sinyal biner adalah sinyal digital yang hanya memiliki dua nilai yang valid. Dalam istilah fisik, pengertian logis dari sinyal biner ditentukan oleh level tegangan atau nilai arus sinyal, dan ini pada gilirannya ditentukan oleh teknologi perangkat. Dalam sirkuit TTL, misalnya, keadaan sebenarnya diwakili oleh logika 1, kira-kira sama dengan +5 volt pada garis sinyal; logika 0 kira-kira 0 volt. Tingkat tegangan antara 0 dan +5 volt dianggap tidak ditentukan.Karena hanya dua status logika, logika 1 dan logika 0, yang dimungkinkan, teknik aljabar Boolean dapat digunakan untuk menganalisis rangkaian digital yang melibatkan sinyal biner. Istilah logika positif diterapkan ke sirkuit di mana logika 1 ditetapkan ke level tegangan yang lebih tinggi; Dalam rangkaian logika negatif, logika 1 ditunjukkan dengan level tegangan yang lebih rendah.
- BCD 7 Segment
Dekoder merupakan rangkaian elektronika yang berfungsi untuk menampilkan kode-kode biner menjadi karakter yang dapat dipahami secara visual. Decoder BCD ke 7 segment merupakan rangkaian elektronika yang berfungsi untuk mengubah kode BCD menjadi karakter tampilan angka desimal yang dapat dilihat secara visual. Ilustrasi dekoder BCD ke 7 segment dapat dipahami dari gambar berikut :
Data BCD 4 bit diubah menjadi tampilan visual angka desimal 0-9 menggunakan rangkaian logika dasar digital (AND, OR dan NOR). Data BCD 4 bit tersebut diubah sesuai nilai desimal seperti pada tabel berikut.

Proses pengkodean data BCD menjadi tampilan angka desimal dilakukan secara terpisah untuk tiap ruas/segment (ruas a- ruas g). Untuk membangun sebuah dekoder 7 segment dari data tabel kebenaran diatas, langkah pertama adalah menentukan persamaan yang dapat mewakili fungsi dekoder tiap ruas. Setelah itu dapat di buat rangkaian decoder untuk tiap ruas menggunakan rangkaian digital dari gerbang logika dasar.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4. PROSEDUR PERCOBAAN [KEMBALI]
1) Buka aplikasi proteus
2) Pilih komponen yang dibutuhkan.
3) Rangkai setiap komponen menjadi rangkaian yang diinginkan
4) Ubah spesifikasi komponen sesuai kebutuhan
5) Jalankan simulasi rangkaian.
5. RANGKAIAN SIMULASI [KEMBALI]
.png)
.png)